Motion Planning at UC Riverside
Cutting-edge research in robotics, computer graphics, and AI
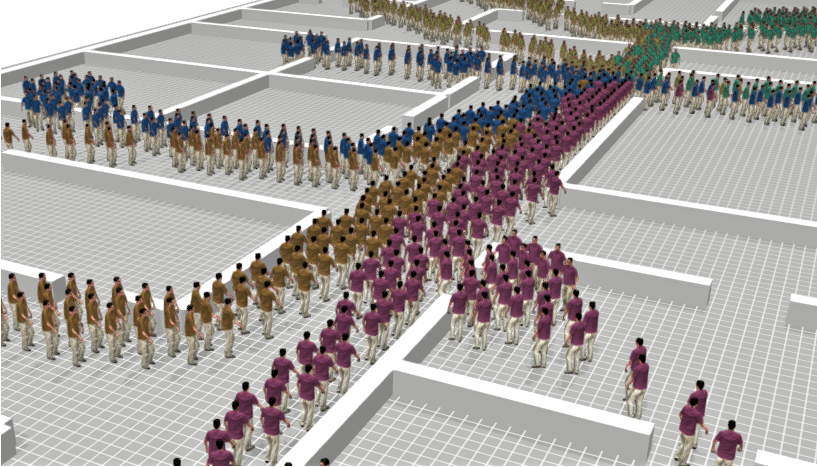
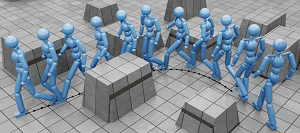
Crowd Simulation

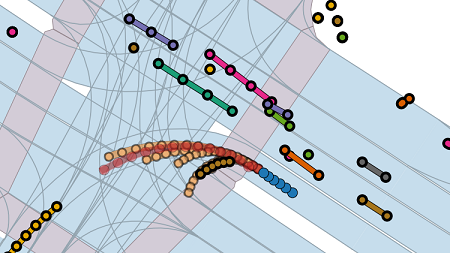
Multiagent Navigation

Collision Avoidance
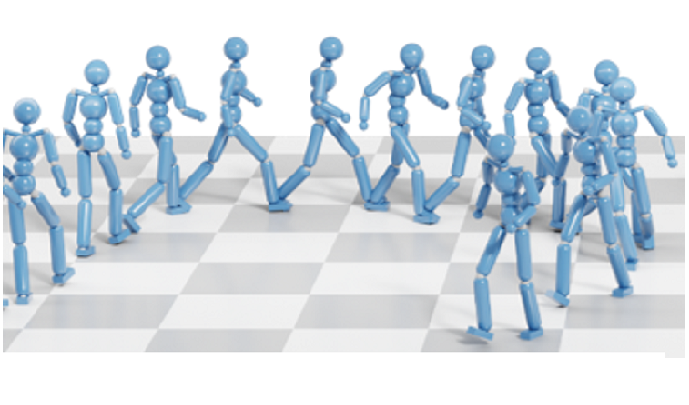
Character Control
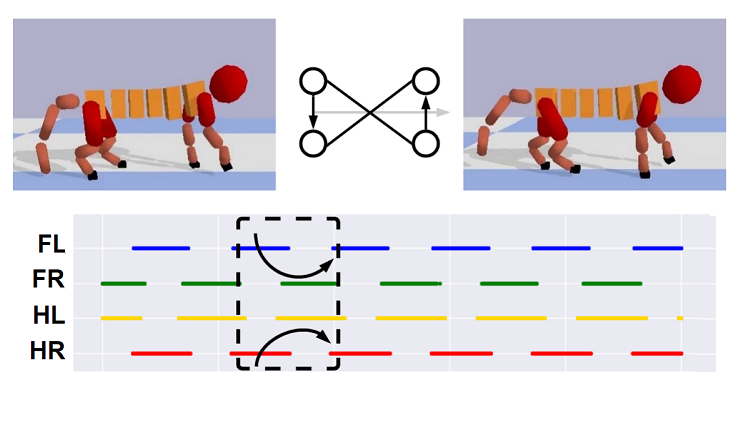
Motion Synthesis
Path Planning
Recent Projects
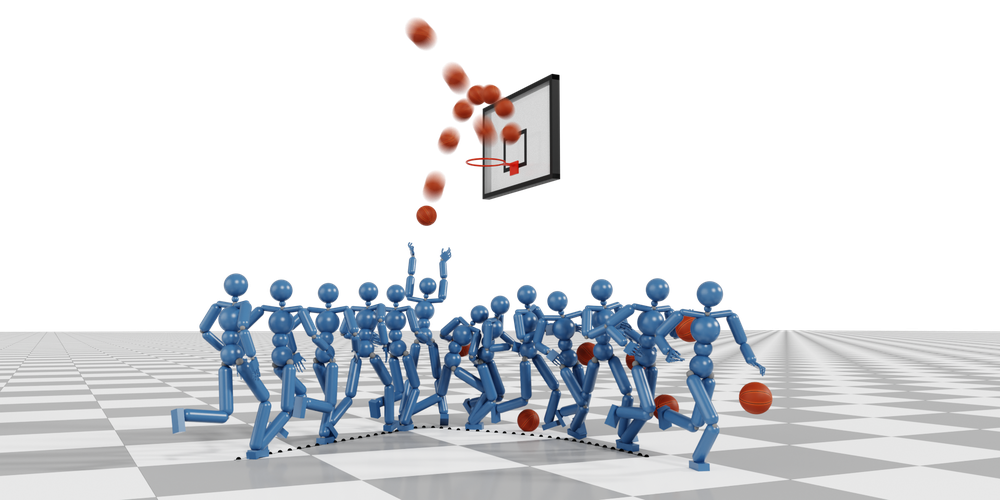
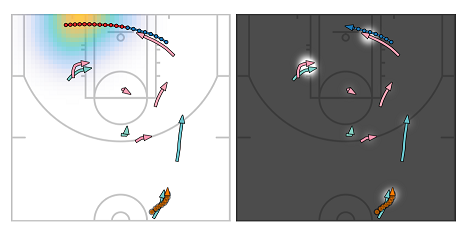
Learning to Ball: Composing Policies for Long-Horizon Basketball Moves
Pei Xu, Zhen Wu, Ruocheng Wang, Vishnu Sarukkai, Kayvon Fatahalian, Ioannis Karamouzas, Victor Zordan, and C. Karen Liu
ACM Transactions on Graphics, (SIGGRAPH Asia), 2025.
[pdf] [code]
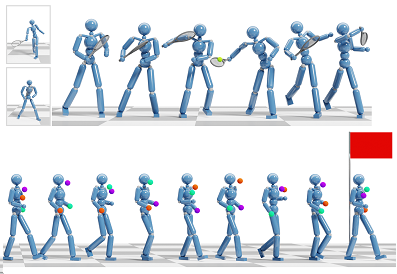
AdaptNet: Policy Adaptation for Physics-Based Character Control
Pei Xu, Kaixiang Xie, Sheldon Andrews, Paul G. Kry, Michael Neff, Morgan McGuire, Ioannis Karamouzas, and Victor Zordan
ACM Transactions on Graphics, 42(6),(SIGGRAPH Asia), 2024.
[pdf] [project]
[code]
Prospective Students
We welcome motivated students who are excited about robotics, computer graphics, and embodied AI. If you are interested in joining the Motion Planning Lab 🤖 as a Ph.D. student, consider applying to the UCR's Ph.D. program in CS and mention Prof. Ioannis Karamouzas as a potential advisor.
If you would like to reach out, please read David Evans advice on how to contact professors about graduate school. Thoughtful, personalized emails are always appreciated.
Sponsors
We would like to thank Amazon, the National Science Foundation, Roblox, and University of California, Riverside for supporting our research.
